NASA Contest Inspires Student Engineers to Design Mining Robot for Mars Exploration
The Red Planet is a frigid, hostile environment, but for Kelly Lai, ’15, it’s a paradise — for revenge. And like the plot of a science fiction movie, the UCF aerospace engineer has created a robot to do her bidding in a personal redemption quest at the NASA Robotic Mining Competition.
In 2014, Lai was part of UCF’s first team to compete in the annual contest, which challenges teams around the country to create remote-controlled mining machines. But a complete mechanical failure prevented them from competing. “I was so upset because a lot of the judges were NASA engineers who graduated from UCF, and they actually called us the home team,” she says. “Failing was heartbreaking, so I came back with a vengeance.”
For the 2015 competition, which took place May 18-22 at Kennedy Space Center, Lai hand-picked a multidisciplinary team with expertise from engineering to marketing and accounting, and spent nearly a year designing and building a new machine. Unfortunately, a communications glitch fouled their final run, but a new UCF team will return in 2016 — and Lai will continue to follow her personal calling to the stars.
“My passion is space exploration. To produce a robot that can mine [materials] to create water or make soil for plants to help sustain life on Mars — that’s what I live for.”
Illustration (Above) by Kentaro Kanamoto
The Competition
From an enclosed control room, remote operators have 10 minutes to navigate a closed course and gather at least 10 kilograms of basaltic regolith simulant (ash) and icy regolith simulant (gravel) to be deposited into a collection bin. Other competition categories include a systems engineering paper, a slide presentation and demonstration, an outreach project promoting STEM education to schoolchildren, and team spirit. The team that collects the most material and earns the most category points wins.
“xKadrill”
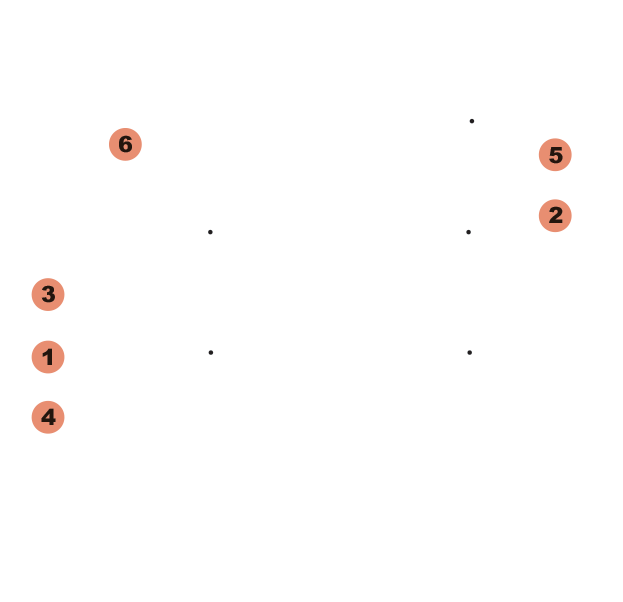
Control
The pilot uses a laptop computer to drive the robot and activate drilling and dumping mechanisms via a Wi-Fi connection.
1 Power source
A lithium iron phosphate motorcycle battery — routed through a distribution board that uses fuses to feed appropriate voltage to each motor — provides enough power to run all electrical systems.
2 Electronics housing
A polycarbonate box sealed with a rubber gasket protects sensitive electronics from penetrating ash that can foul the delicate instruments. Inside, a BeagleBone Black circuit board uses microcontrollers to run all systems.
3 Actuator system
A scissor jack system powered by a linear actuator moves the drill and hopper assembly up and down to control ground clearance, drilling depth and dumping into the collection bin.
4 Wheels
At 8 inches in diameter and 2 inches wide, the rubber-treaded VEX Robotics wheels create enough traction to move the robot through soft ash. Each wheel is powered independently by a dedicated CIM motor, allowing the pilot to maneuver the fixed wheel with a skid-steering technique.
5 Drill
Powered by an electric motor, a rotating, 4-inch diameter steel auger used commercially to drill postholes penetrates the layer of ash to mine the high-value gravel beneath. A PVC housing helps to carry the material up and into the collection hopper.
6 Hopper
Made from aluminum sheet metal with a polycarbonate lid and sides, this triangular collection bin uses gravity to assist the removal of excavated material through a rear dump door operated by a remote-controlled motor. An LED light array signals green while mining until a red light indicates full capacity.